Evernote ist eine praktische Anwendung. Mit ihr können Notizen gespeichert und verwaltet werden. Leider verlangt Evernote mittlerweile happige Preise für seine Premium-Funktionalitäten. Aus meiner Sicht ist dies allerdings das kleinere Problem. Viel schwerer wiegt, das die eigenen Daten einer amerikanischen Firma anvertraut werden müssen. Neben den proprietären Alternativen wie z.B. OneNote von Microsoft, gibt es mittlerweile einige freie Alternativen. Bevor man sich nach einer Alternative umschaut, sollte man erst einmal schauen welche essentiellen Features Evernote bietet. Kurz zusammengefasst sind die wichtigsten Features die Synchronisation über verschiedenen Geräte, der Web-Clipper, die Offline-Funktionalität und die OCR-Erkennung für PDF, Bilder und ähnliches. Wie wichtig jedes dieser Features ist bleibt der eigenen Gewichtung überlassen.
Mir persönlich wäre eine Lösung auf Basis von Nextcloud am liebsten. Als Notizanwendung auf Markdown-Basis bietet sich die Nextcloud App Notes an. Allerdings handelt es sich hierbei nur um eine rudimentäre Lösung. Mehr in die Richtung Evernote gehen die Lösungen ownNotes bzw. dessen Fork NextNote. Leider scheint bei diesen beiden Projekten keine Weiterentwicklung mehr stattzufinden bzw. diese sehr träge zu verlaufen.
Neben auf ownCloud bzw. Nextcloud basierenden Lösungen, gibt es eine Reihe von Standalone-Lösungen. Zu nennen wären hier unter anderem Paperworks, Permanote, Laverna, TagSpaces, Nemex, Brainstorm und OpenNote.
Die Login-Seite von wallabag
Vielen diesen Lösungen werden entweder nicht mehr weiterentwickelt oder lassen nicht wirklich das Evernote-Feeling aufkommen. Daneben gibt es Lösungen welche sich für bestimmte Aspekte von Evernote als Ersatz eignen. Ein Beispiel dafür ist wallabag, welches sich als Read-It-Later-Lösung versteht und zur Archivierung von Webseiten genutzt werden kann.
Eine Lösung welche in letzter Zeit verstärkt in den Fokus gerät ist Joplin, die vom gleichen Entwickler wie eine hier vor längerer Zeit vorgestellte Backuplösung ist. Joplin versteht sich als Alternative zu Evernote und setzt voll und ganz auf Markdown. Das bedeutet allerdings nicht das man keine Bilder oder andere Anhänge zu einem Projekt hinzufügen kann; dies ist problemlos möglich.
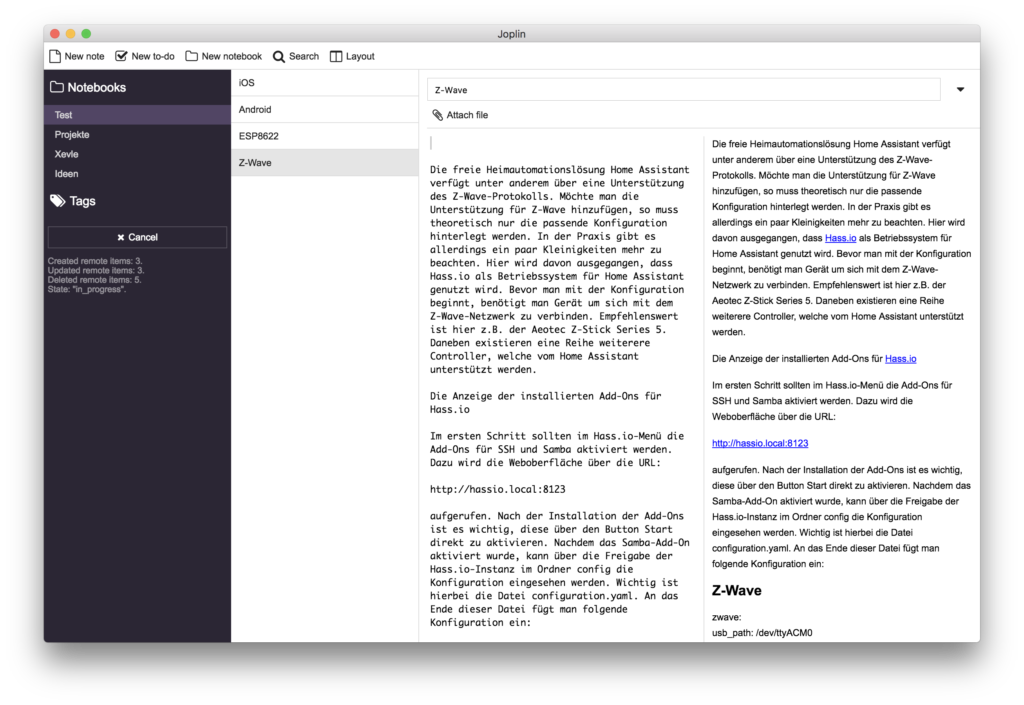
Joplin unter macOS
Für Joplin existieren Clients für macOS, Linux und Windows. Für die mobilen Plattformen existieren Apps für iOS und Android.
Als Backend unterstützt Joplin, das Dateisystem und eine Synchronisation zu OneDrive. An einer Unterstützung für Nextcloud und Dropbox wird gearbeitet. Laut dem Entwickler, wird diese nach der Beseitigung eines speziellen React Native Bugs implementiert:
Currently, synchronisation is possible with OneDrive (by default) or the local filesystem. A NextCloud driver, and a Dropbox one will also be available once this React Native bug is fixed. When syncing with OneDrive, Joplin creates a sub-directory in OneDrive, in /Apps/Joplin and read/write the notes and notebooks from it. The application does not have access to anything outside this directory.
Durch die geplante Nextcloud-Unterstützung ist es möglich die Synchronisierung auf dem eigenen Server zu nutzen; die eigenen Daten bleiben somit geschützt. Joplin hat mittlerweile die Betaphase verlassen und kann produktiv genutzt werden. Für einen Umstieg von Evernote auf Joplin existiert in der Anwendung eine Importfunktion um die enex-Dateien, welche beim Export aus Evernote erzeugt werden, zu importieren. Der Quelltext ist auf GitHub zu finden und unter der MIT-Lizenz lizenziert. Daneben gibt es eine offizielle Projektseite.